实验原理
(1)实验原理
(一)多目标决策原理
在社会经济系统的研究控制过程中我们所面临的系统决策问题常常是多目标的,例如我们在研究物流中心仓储出入库过程的组织决策时,既要考虑物流系统的出入库效率高, 又要使物流系统运作成本低等。这些目标之间相互作用和矛盾,使决策过程相当复杂,这类具有多个目标的决策总是就是多目标决策。本项目主要围绕着智慧仓智能物流拣选系统降本增效,选择物流设备成本、 设备任务均衡、最大完工时间、移动机器人空驶里程等多种决策目标。同时设计考虑成本优先、效率优先和成本效率均衡等多种情景优化目标实验任务,通过开放式的决策过程,鼓励学生进行探索创新, 不断改进提升绿色低碳背景下的优化方案。
(二)AGV机器人智能拣选系统运作原理
AGV机器人智能拣选系统通过主控系统、AGV机器人、可移动货架、工作台来实现订单分拣、包装、输送、二次分拣以及出入库作业的智能化。 运作原理包括AGV物流机器人智能拣选业务逻辑和智能拣选策略两部分。AGV物流机器人智能拣选业务逻辑如下图1所示,AGV机器人根据控制系统的指令到达待拣选品项所在的货架下,举起货架搬运至指定拣选台, 拣选人员根据订单信息依次完成拣选任务;拣选完成后,AGV 机器人根据指令移动至下一个拣选台或将货架搬回原始位置,从而开始下一个拣选任务,空载的AGV机器人可在货架下行走。
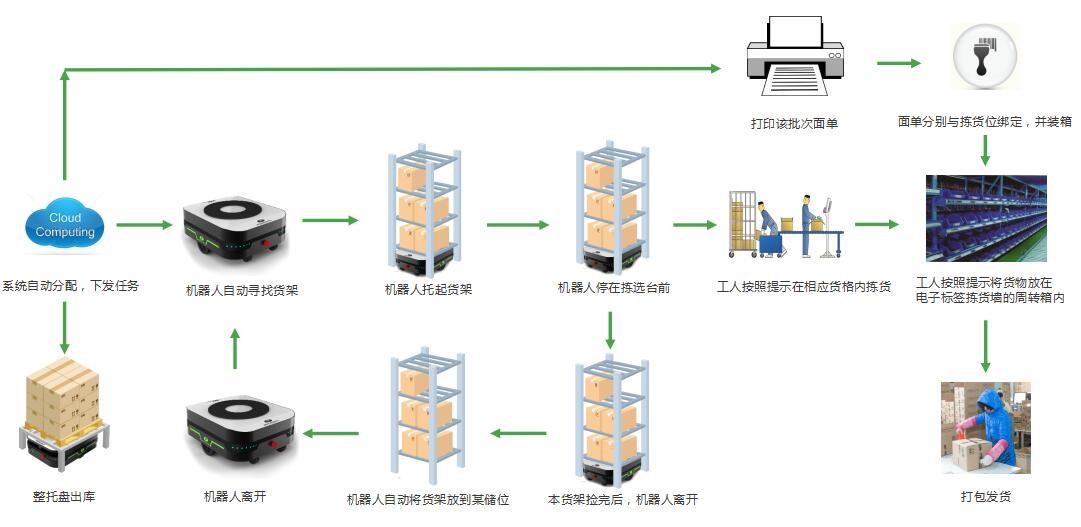
图1 AGV物流机器人智能拣选业务逻辑
AGV物流机器人智能拣选策略包括订单分批策略、货架储位分配、货架布局策略、AGV机器人任务指派策略、AGV机器人路径优化策略等。储位分配策略是货品和设备之间的逻辑关系。 储位分配策略就是将货品分配到一定的存储位置,包括区域分配和位置分配。物流机器人任务指派策略是物流机器人和货品之间的逻辑关系。物流机器人被安排到指定的货品货架。 分批拣选策略是拣选者和订单之间的逻辑关系。分批拣选策略就是将一大组订单分成很多小组,每个小组内的订单可以在一个机器人拣选任务周期里完成拣选。物流机器人路径优化策略是订单或货品之间的逻辑关系。 此策略将拣选单上的货品排序以保证一个好的拣选路径。订单拣选系统实际应用作业策略不同则所需的订单拣选时间也不同。
(三)仓储绿色物流原理
仓储绿色物流指的是采用节能、环保、资源节约的方法进行仓储和物流过程中各个环节的管理与控制,以减少能源消耗、降低环境污染、提高资源利用率,并为经济发展提供更加可持续的保障。 仓储绿色物流的实施策略:节能减排措施:采用节能降耗材料和设备,推广绿色运输工具,减少运输能耗和尾气排放。环保技术应用:采用环保材料,利用清洁能源,提高仓储和物流企业的环保意识和环保设备的应用。 资源循环再利用:实现包装、物流设备和运输的资源共享、循环再利用。货源共享:通过建立仓储和物流信息平台,实现货源及运输资源的共享,减少空载率,提高物流效率。
知识点:共6类,19个
1. 物流数据分析:ABC分析、EIQ分析、出入库效率分析
2. 绿色仓储管理:绿色包装、绿色装卸搬运设备、绿色仓储管理制度。
3. 储位分配策略:定位存放、随机存放、分类存放、分类随机
4. 货架布局策略:周转率策略、动态调整策略
5. 订单拣货策略:按单拣货、批量拣货、订单分割、订单分批
6. 机器人任务指派:就近指派、智能指派
(2)核心要素仿真设计
1、智慧仓运行虚拟仿真场景:该要素以泉州鞋服企业的智慧物流产业园智能仓储中心为对象,构建虚拟化、数字化的智慧仓,实验者在“漫游模式”中通过“业务导航”、 “漫游观察”对智慧仓进行自由探索,学习认知智慧仓AGV机器人智能拣选设备、作业流程、绿色,包括利用实地观察法、访谈法等,与实际现场调研类似。
2.智慧仓运行决策目标仿真模拟:该要素模拟现实中对物流系统降本增效的目标要求,根据实际业务场景需求分为成本优先决策目标、效率优先决策目标、 成本效率均衡决策目标三个情景决策实验任务,学生可以选择不同的成本和效率指标组成指标体系,设计相应的智慧仓运行成本效率综合评价指数,拓展实验教学的深度与广度。
3.智慧仓智能拣选运作优化方案仿真设计:该要素模拟智慧仓智能拣选从订单分批、储位分配、货架布局、AGV机器人任务指派、AGV机器人路径优化、 工作台人工操作等一系列拣选组合策略链、操作过程和绿色改进措施,学生可反复调整运作过程中各种拣选策略、设备操作和绿色改进措施,实现探究式教学。
4.智慧仓运行仓储数据集仿真:该要素模拟鞋服企业智慧仓商品数据、订单数据、历史销售数据、出入库统计数据,以真实鞋服企业的实际运行数据为基础进行数据清洗和脱敏, 构建本项目智慧仓运行仓储数据集。